
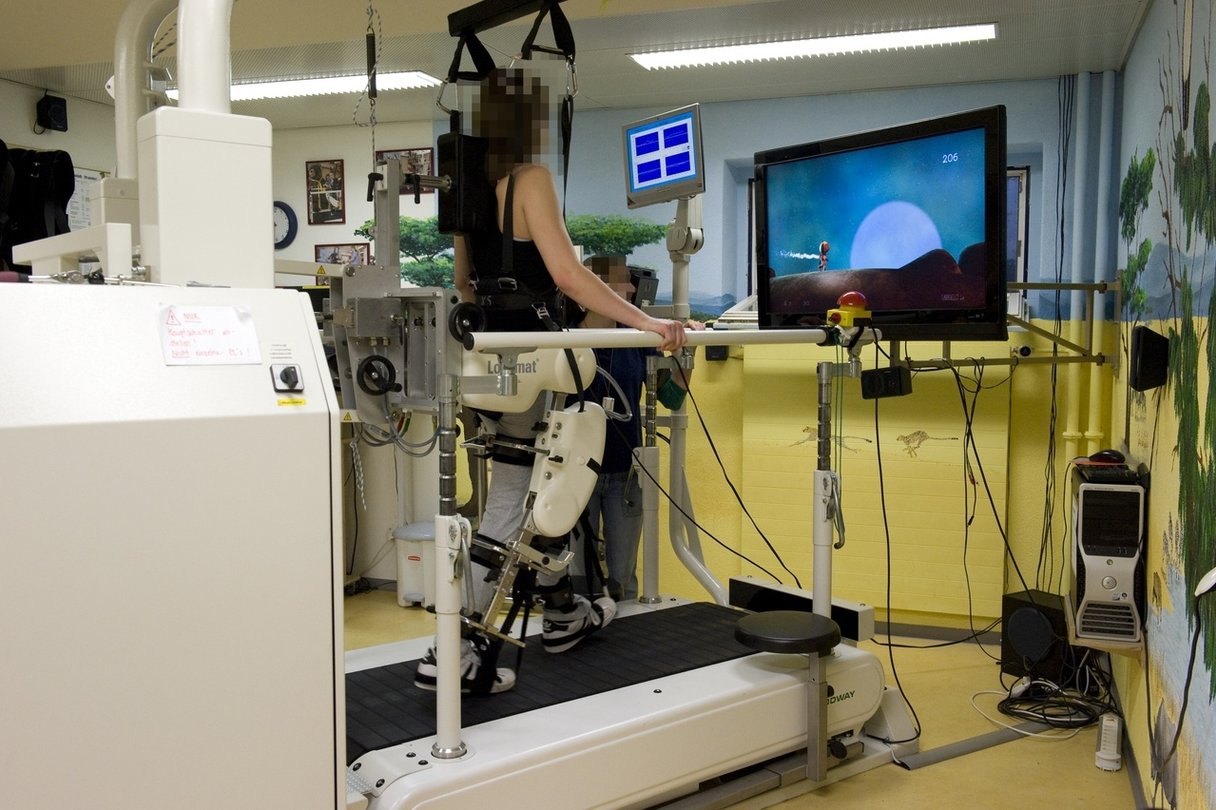
Das Gabarello-Team der Zürcher Hochschule der Künste: »Ein Roboter lehrt laufen: Der Physiotherapieroboter Lokomat® wird bei der motorischen Rehabilitation eingesetzt. Er therapiert Patienten, deren Hirnregionen, welche die Steuerung des Bewegungsapparates leisten, verletzt oder gestört sind und die daher nicht mehr gehen können. Die Therapie nutzt die Eigenheit des menschlichen Gehirns, ausgefallene Funktionen durch andauerndes Training in anderen Hirnregionen erneut auszubilden. So kann die verlorene Gehfähigkeit wieder er-langt werden. Der Lokomat wird weltweit in Spezialkliniken eingesetzt – so auch an den Universi-tätskinderkliniken Zürich, deren Version speziell auf Kinder und Jugendliche zugeschnitten ist, die dort den langen Weg der Rehabilitation beschreiten.
Entscheidend für den Therapieerfolg ist intensives Training im Lokomat. Bei Kindern stellt die Moti-vation allerdings einen kritischen Faktor dar: Oft müssen die Therapeuten gut zureden, um sie bei Laune zu halten und ihre aktive Teilnahme an dem Bewegungsablauf zu fördern. Da die Studienver-tiefung Game Design bereits erfolgreich Serious Games für das Kinderspital entwickelt hatte, fiel die Idee zur Entwicklung eines physiotherapeutischen Videospiels für den Lokomat auf fruchtbaren Bo-den. Therapeuten wie Mediziner erkannten schnell das Potenzial eines exakt auf die Situation entwi-ckelten »Applied Game«, das die kleinen Patienten begeistert und sie die Trainingssituation vergessen lässt. Daraufhin entstand ein interdisziplinäres Forschungsteam unter Beteiligung der ZHdK, des Ro-boterherstellers Hocoma AG, der Universitätskinderkliniken Zürich sowie des Sensory Motor Sys-tems Lab der ETH Zürich. Das Neuropsychologische Institut der Universität Zürich führte außerdem eine wissenschaftliche Evaluation des realisierten Projekts durch. Finanziert wurde das »Gabarello Vs. 1.0« (Game based rehabilitation for Lokomat) benannte Projekt von einer Stiftung zur Kinderhilfe.Den Spieler lenken
Viele Spielkonzepte ...
Um im neuen Themengebiet erste Spielideen entwickeln zu können, bestand die erste Aufgabe des Game Design Teams in der gezielten Beobachtung von Therapiesituationen sowie in der Erhebung der Vorgaben, Bedürfnisse und Wünsche der unterschiedlichen Parteien und Nutzergrup-pen.
Basierend auf den vorliegenden Anforderungen galt es außerdem ein breites Spektrum an Konzepten zu entwickeln, um Abhängigkeiten und Grenzen sowie Möglichkeiten der Spielentwicklung auszulo-ten. Dazu wurden zunächst sieben Spielkonzepte entworfen, um sich dem erklärten Ziel des Spiels zu näheren: der drohenden Monotonie entgegenwirken und den Kindern oder Jugend-lichen ein Training mit Vergnügen und ganzem Einsatz ermöglichen. Fünf der skizzierten Konzepte wurden anschließend in einer frühen Phase in zum Teil spielbare Prototypen umgesetzt und vom Team im Reha-Roboter getestet. Anhand der eigenen Erlebnisse sowie des wertvollen Feedbacks von Therapeuten und Medizinern konnten die Konzepte systematisch geschärft werden. Zunehmend rückte dabei die Benutzergruppe der Physiotherapeuten in den Fokus der Entwicklung, da diese entscheidende Hinweise über Laufrhythmen und die daraus folgende Gestaltung der Game Le-vel einbringen konnten. Darüber hinaus wurde deutlich, dass das Spielkonzept für Patienten und The-rapeuten gleichermaßen selbsterklärend sein muss und keinesfalls zu einer weiteren Beanspruchung führen darf. Denn neben dem Patienten und seinem Vorankommen im Therapiespiel muss der Thera-peut zugleich die Softwareeinstellungen des Lokomat überwachen. Schließlich ist das auf allen Ebe-nen aussichtsreichste Konzept realisiert worden, das neben attraktiv gestalteten Spielszenarien auch den Wiederspielwert über mehrere Therapiesitzungen berücksichtigt.
... ein Gameplay
Ein Ergebnis der Konzeptphase war die Anforderung nach einem stressfreien, freund-lichen Szenario, das einerseits genügend Wettbewerb bietet und andererseits ausschließlich positive Anreize verwendet. Entsprechend wurde die Spielfigur gestaltet: Ein kleiner Raumfahrer wird von einer Rakete auf einem Planeten abgesetzt und spaziert auf ihm herum. Spielziel ist es, möglichst viele herumschwirrende Lichter zu entfachen, mit denen der dunkle, versteinerte Planet beleuchtet und zum Leben erweckt wird.
Das Besondere und zugleich die weitreichendste Einschränkung in der Spielsteuerung ist, dass der Spielverlauf einzig durch die Intensität der Beinbewegungen beeinflusst wird. Der Patient treibt die Spielhandlung durch das eigene vom Roboter unterstütze Gehen voran und beeinflusst so den Spiel-verlauf. Die Spielsteuerung werten Roboter und Spiel dabei in Echtzeit aus. Die gemessene Anstren-gung eines Patienten fließt als Information direkt ins Spiel und entscheidet über die Wahl des Weges, die Fähigkeiten und den Zustand der Spielfigur. Diese kann zum Beispiel sichtlich weiter springen oder schneller laufen. Auf diese Weise werden kognitive wie koordinative Fähigkeiten gleichermaßen angesprochen.
Der Roboter lernt spielen
Die erste technische Herausforderung bestand in der Anbindung des Therapie-Roboters an das Spiel bzw. der Abstimmung der drei Komponenten Lokomat mit Steuerungssoftware, Therapeuteninterface mit Interfacesoftware und VirtualReality-Computer (im folgenden VR-Computer) mit Videospiel.
Das Kernstück in diesem Setting stellt die Steuerungssoftware des Lokomat dar, die direkt mit diesem verankert ist und den Roboter verwaltet. Zur Aufgabe der Steuerungssoftware gehört neben der Steue-rung und Kontrolle des Automaten auch die Verarbeitung des Inputs des Therapeuten-Interfaces. Auf diesen Daten aufbauend streamt die Steuerungssoftware Livedaten über ein abgeschottetes Netzwerk. Das Videospiel auf dem VR-Computer empfängt dann diese speziell für Gabarello Vs. 1.0 zusam-mengestellten Rohdaten und bereitet sie auf. Als Protokoll kommt das User Datagram Protocol (UDP) zum Einsatz, das einen konstanten Stream der Live-Daten gewährleistet. Letztere werden vom Spiel als Floating-Point-Werte ausgelesen. Sie umfassen unter anderem einen Zeitindex (Timestamp), die Lage der Beine (Winkelangaben), eine Auswertung der Aktivität des Patienten (Biofeedback) sowie Spielsteuerungsinformationen (Neustart, Pause, Animationstypen etc.) der Interfacesoftware. Am Therapeuten-Interface können zusätzliche Einstellungen erfolgen, zum Beispiel Synchronisierung des Bewegungsablaufs der Spielfigur mit dem der Roboterbeine oder deren völlige Entkopplung. Das hier vorgestellte Setting mit dem Spiel Gabarello Vs. 1.0 unterliegt außerdem -- da im klinischen Rahmen angewendet -- medizinischen Bestimmungen. Die Software darf zu keinem Zeitpunkt eine Gefahr für den Patienten darstellen.
» Den vollständigen Artikel lest ihr in einem Special auf makinggames.de
Jedes Wochenende präsentieren wir euch ausgewählte Making-Of-Artikel, Reportagen sowie Interviews aus unserem Schwestermagazin Making Games und lassen euch hinter die Kulissen der Spielebranche blicken.
Und wer könnte besser über die großen und kleinen Geheimnisse der Spieleentwicklung schreiben als die Entwickler selbst? Genau das machen sie jede Ausgabe im Making Games Magazin und jeden Tag auf makinggames.de.
Dieser Artikel erschien in Ausgabe 01/2011 des Making Games Magazins.




Nur angemeldete Benutzer können kommentieren und bewerten.
Dein Kommentar wurde nicht gespeichert. Dies kann folgende Ursachen haben:
1. Der Kommentar ist länger als 4000 Zeichen.
2. Du hast versucht, einen Kommentar innerhalb der 10-Sekunden-Schreibsperre zu senden.
3. Dein Kommentar wurde als Spam identifiziert. Bitte beachte unsere Richtlinien zum Erstellen von Kommentaren.
4. Du verfügst nicht über die nötigen Schreibrechte bzw. wurdest gebannt.
Bei Fragen oder Problemen nutze bitte das Kontakt-Formular.
Nur angemeldete Benutzer können kommentieren und bewerten.
Nur angemeldete Plus-Mitglieder können Plus-Inhalte kommentieren und bewerten.